Biography
I am a Research Engineer at X Square Robot, specializing in developing cutting-edge Vision-Language-Action (VLA) models for Embodied AI systems.
I hold an MPhil degree from the University of Hong Kong, where I conducted research under Prof. Heming Cui, focusing on robot perception and motion planning. Previously, I graduated with a BEng degree with First Class Honors from Lanzhou Jiaotong University, where I was mentored by Prof. Jiuyuan Huo and received the prestigious Tsung-Dao Lee Scholarship — an honor awarded annually to only one outstanding undergraduate.
I am an active member of AnySyn3D, collaborating closely with Prof. Xiaoxiao Long on advanced 3D research. My industry experience includes research internships at Horizon Robotics under Dr. Wei Yin, and at the Chinese Academy of Sciences (CASIA).
- Hiring! Contact For Referrals.
- Open To Collaborations & New Projects.
- Embodied AI
- 3D Computer Vision
- SLAM & Point Cloud
- Edge Computing
- Artificial Intelligence
MPhil in Computer Science, 2022.09-2024.09
The University of Hong Kong(HKU)
BEng in Computer Science and Technology, 2018.09-2022.06
Lanzhou Jiaotong University(LZJTU)
Oxford Machine Learning Summer School, 2022.06-2022.08
The University of Oxford
News
- [2025/09/08] 👉👉 Our team has open-sourced WALL-OSS !
- [2025/06/16] 🎉🎉 One paper accepted to IROS 2025 !
- [2025/04/11] 🎤🎤 Delivered a KeyNote Talk on AGR Navigation at AMOV Lab !
- [2025/02/27] 🎉🎉 One paper accepted to CVPR 2025 !
- [2025/01/28] 🎉🎉 One paper accepted to ICRA 2025 !
- [2024/12/03] 🎉🎉 One paper accepted to IEEE Robotics and Automation Letters (RA-L) !
- [2024/10/11] 🎉🎉 I was awarded two research scholarships totaling 10,000 RMB from AMOV Lab
- [2024/09/13] 🎉🎉 One paper accepted to IEEE Robotics and Automation Letters (RA-L) !
- [2024/08/29] 👨🎓👨🎓 I have successfully defended my MPhil thesis!
- [2024/06/17] 🎉🎉 One paper accepted to ICCC 2024 !
- [2024/05/20] 🎉🎉 One paper accepted to ApPLIED Workshop @PODC'24 !
- [2024/04/07] 🎉🎉 One paper accepted to ICMR 2024 !
- [2024/01/30] 🎉🎉 One paper accepted to ICRA 2024 !
- [2023/05/28] 🎉🎉 One paper accepted to AIML Workshop @COMPSAC'23 !
- [2023/07/15] Our project won the CCF Computer Application Product Innovation Award.
- [2023/04/06] Our project won the National Second Prize in The First IPv6 Technology Application Innovation Competition.
- [2022/09/30] 🐦I had a wonderful time at SenseTime's (Hong Kong) Artificial Intelligence Technology Day.
- [2022/09/01] 👋Today I started my Master of Philosophy (MPhil) program at the University of Hong Kong (HKU) !
- [2022/08/01] 👉I attended the Oxford Machine Learning Summer School .
- [2022/07/04] 📚I attended the USTC Online Summer School to start my Computer Graphics journey !
- [2022/06/17] ❤️I graduated from Lanzhou Jiaotong University(LZJTU)!
- [2021/06/13] 🐦Won the Innovative Person Title (TOP 1%)
- [2020/07/31] A patent for invention is issued (CN111476813A)
- [2020/05/01] A Patent for Utility Model is granted (CN212084334U)
- [2020/03/01] One paper was accepted by RICAI2020
- [2020/02/20] One paper was accepted by the Scientific & Technical Information of Gansu (Chinese Journal)
- [2020/02/01] One paper was accepted by the Microcontrollers & Embedded Systems (Chinese Journal)
- [2021/01/01] I joined Jiabao Trading Co., Ltd. as a Python intern
- [2020/02/01] I joined Hengsheng Electronic Technology Co., Ltd. as a Java intern
- [2019/01/01] I joined the Laboratory for Intelligent Computing and Big Data Lab(LZJTU) as a Research Assistant , supervised by Prof. Jiuyuan Huo
Research Interests
Learning
Perception
Manipulation
Planning
Selected Publications
Experience
Responsibilities include:
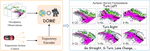
* Diffusion-based End-to-End Path Planner
* GPT-4o-Guided Human-like Trajectory Scorer Responsibilities include:
* FITE7411B - RegTech in finance, with Prof.Douglas Arner
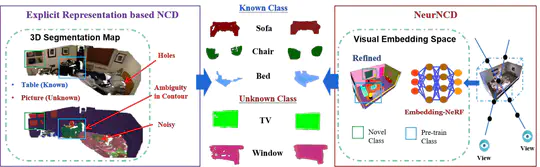
* COMP7503 - Multimedia technologies, with Dr. Bill Luo * Implementing a novel class discovery framework Based on NeRF;
* Responsible for paper writing. * Machine Learning Fundamentals;
* Machine Learning and Finance Track. Responsibilities include:
* Completed 2 innovation training projects for college students;
* Won 8 national awards in competitions;
* Published 3 academic papers and secured 2 patents.Projects
Junming Wang, Supervisor - Prof.Heming Cui

Junming Wang, Supervisor - Prof.Heming Cui
Junming Wang, Supervisor - Prof.Heming Cui

Shengliang Deng, Junming Wang, Supervisor - Prof.Heming Cui
Junming Wang
Junming Wang, Supervisor - Prof.Song Wang

Junming Wang, Hamzah Murad Mohammed Al-Neshmi, Dan Yang, Zhilu Zhao, Jintao Wei
(National Level- ¥ 10000 RMB)
Junbo Guo, Junming Wang, Lin Mu, Meng Liu, Zicheng Wang
(Provincial Level- ¥ 4000 RMB)

Accomplishments
Scholarship
2024 AMOV Lab Research Scholarship
¥10000 RMB (TOP 1%)
2019 and 2020 and 2021 Individual Scholarship
¥16000 RMB (TOP 1%)
2021-08 Tsung-Dao Lee Scholarship
¥5000 RMB (TOP 1%)
2022-03 The Stars of Self-improvement of Chinese College Students Scholarship
¥2000 RMB (TOP 1%)
2021-12 The Second Prize Scholarship
¥1000 RMB (TOP 5%)
Competition
Mathematical Contest In Modeling
Meritorious Winners - America
China Computer Federation (CCF) Computer Application Technology Award
National Second Prize - China
IPv6 Technology Application Innovation Competition
National Second Prize - China
(Huawei Cup) College Student Internet of Things Design Competition
National Second Prize - China
China National College Student "Innovation, Originality and Entrepreneurship" Challenge
National Second Prize - China
(Bochuang Cup) Embedded Artificial Intelligence Design Competition
National Second Prize - China
Mathematical Contest In Modeling
National Second Prize - China
Renewable Energy Outstanding Science and Technology Works Competition
National Third Prize - China

